随着我国尤其是珠三角地区成为世界工厂的角色越来越重,同时对机械加工产品质量的要求越来越高,我国对五轴数控产品的需求会更加强劲。如果突破了五轴数控产品的技术瓶颈,就可以在拥有完全自主产权的中高档数控产品,在市场取代进口。本项目正是瞄准五轴数控系统的发展方向,研究五轴连续轨迹速度规划和多轴协调控制,并用开放式运动控制器来实现,为我国具有自主知识产权的五轴数控机床的快速产业化提供基础技术保证
研究领域
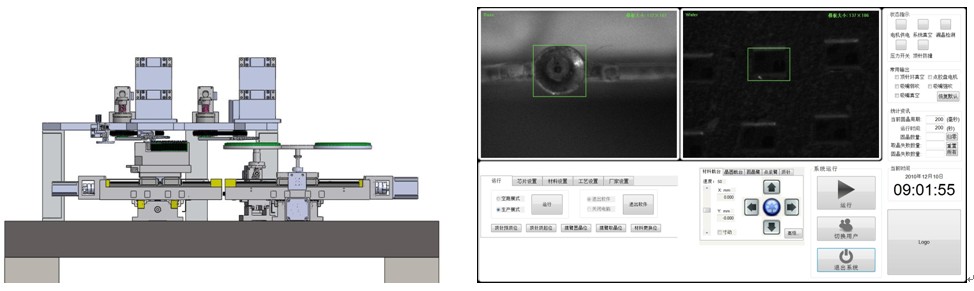
- 高速、高精度视觉技术的研发
- 直驱电机及驱动器的研
- 4、5轴高性能装备技术的研究
研究内容
数控系统方面
人机界面技术的设计与实现: 通过三维图形仿真真实机床加工来实现防止各种干涉碰撞;
速度规划模块的设计与实现:考虑机床各轴****速度和加速度限制,刀具材料和加工材料,主轴转速和力矩等诸多因素的智能模块;
硬件实现的的插补模块: 目标是实现各种误差动态补偿;
用户自定义工艺设计模块的设计与实现:主要提供通讯接口,用户可以在该系统上根据实际机床的工艺要求增加自己的处理模块。
机床结构设计
基于商联机构设计理论的新型构型的研究:考虑到新型功能部件的选用,直线运动全部使用直线电机,旋转运动使用直驱电机。重点考察几种特殊的五轴机床构型,建立动力学模型,比较其运动特性,选出****方案。
综合考虑机械性能,优化机械结构:研究加工过程中的热平衡,机床的震动等方面的影响。在机械结构优化中同步考虑这些因素,得到机械设计优化方案。